Statics Modules
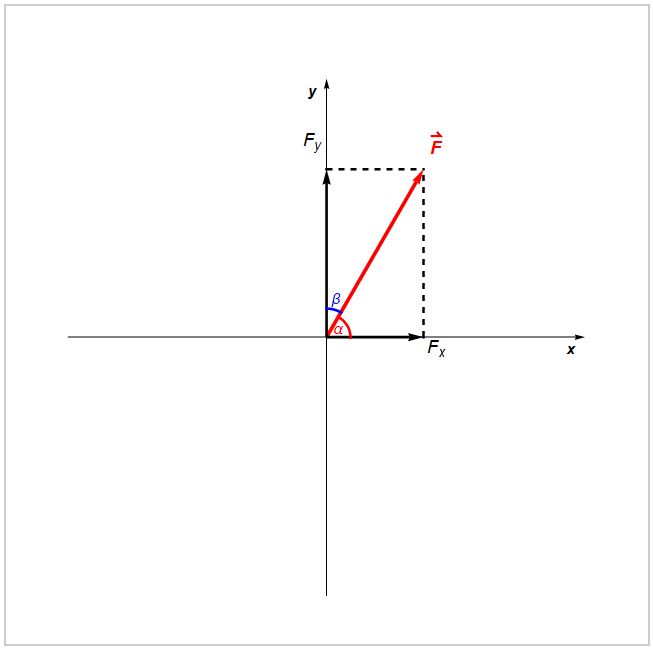
1. Force Vector (2D)
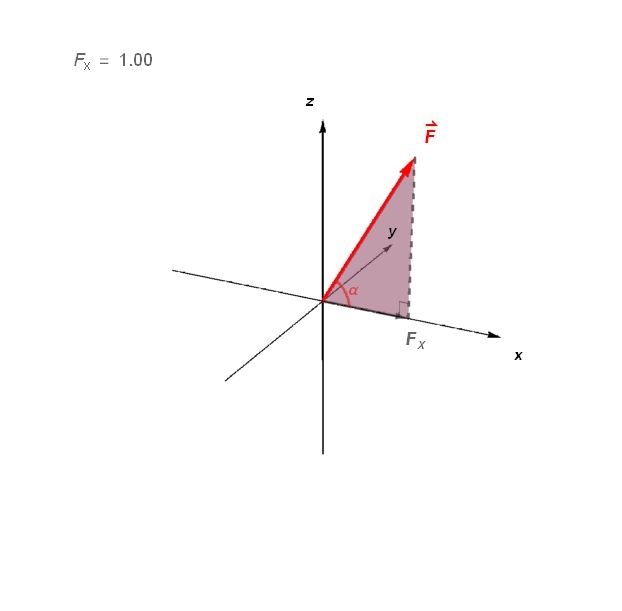
2. Force Vector (3D)
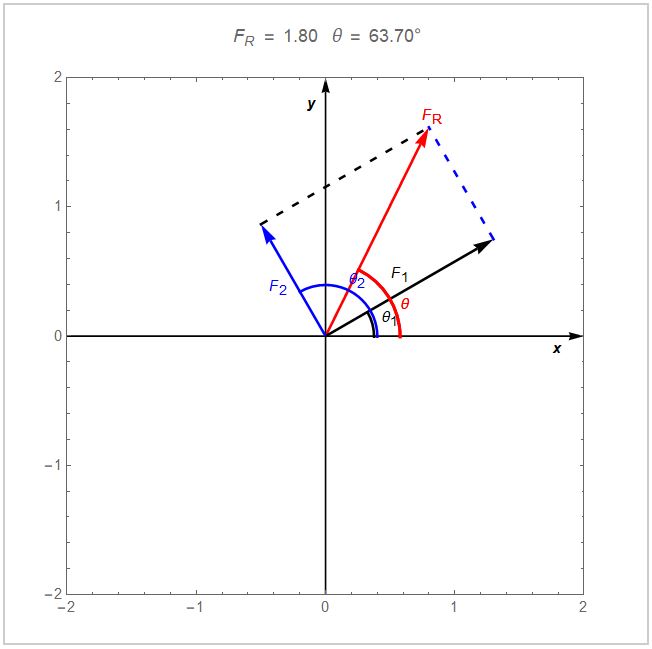
3. Force Vector Addition
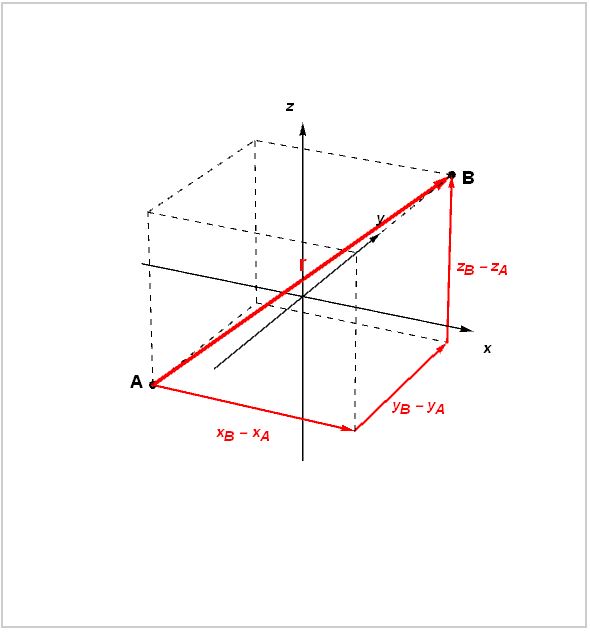
4. Position Vector
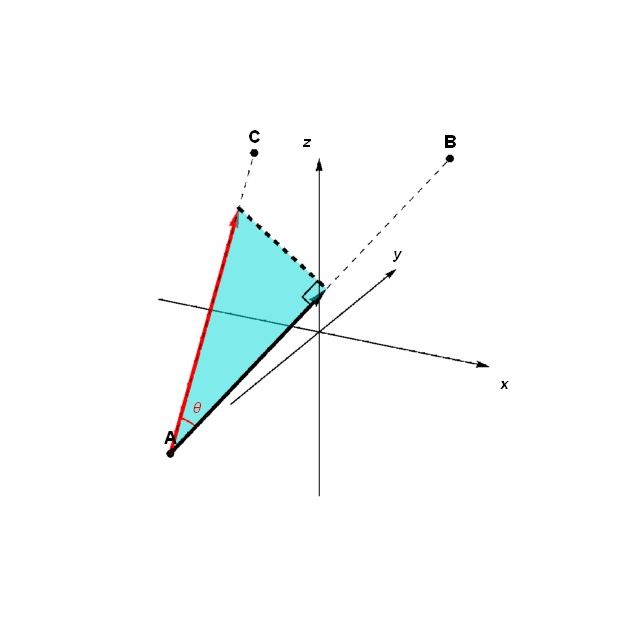
5. Force Projection 1
6. Force Projection 2

7. Particle Equilibrium (2D)
8. Particle Equilibrium (3D)
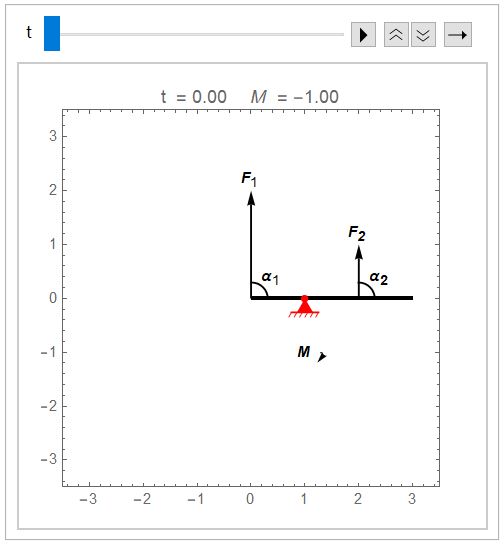
9. Moment of a Force (2D)
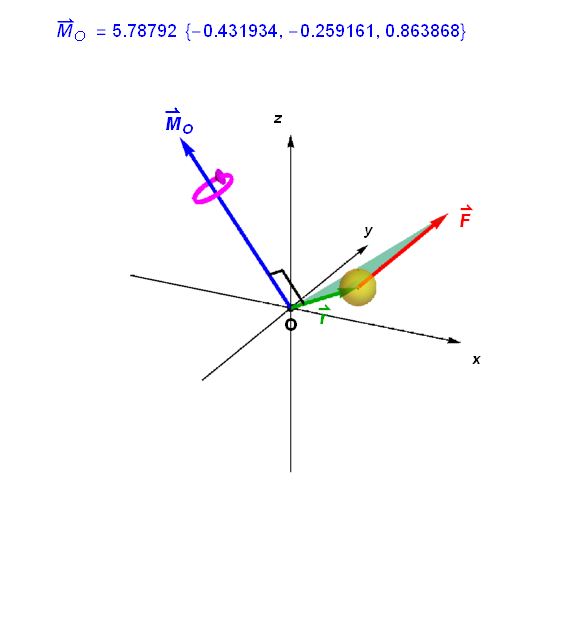
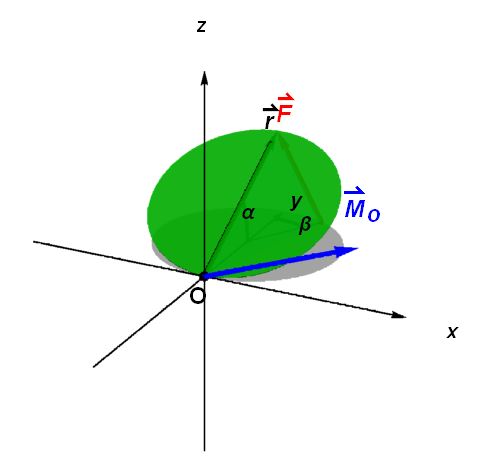
10. Moment of a Force (3D)
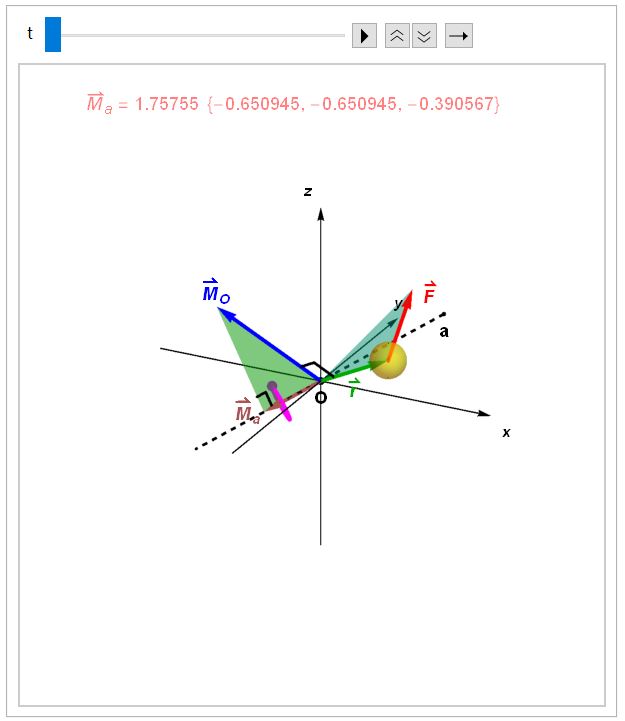
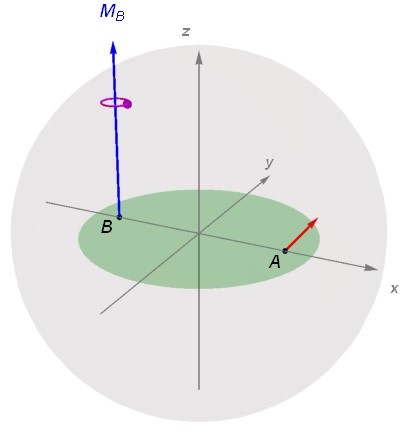
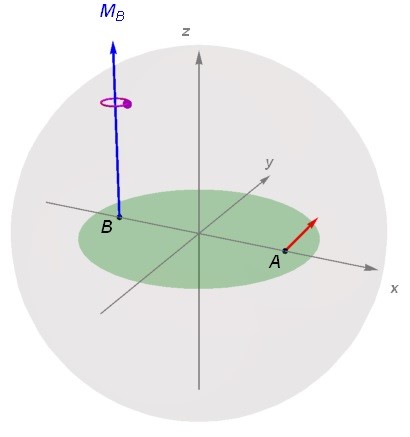
11. Moment of a Force about an Axis
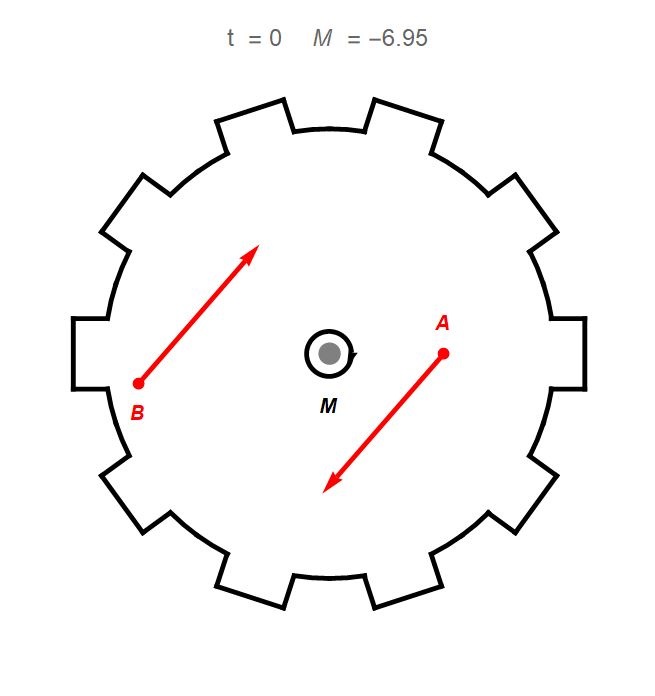
12. Couple Moment
13. Moving a Force to a Point
14. Moving a Force to a Point
Animation
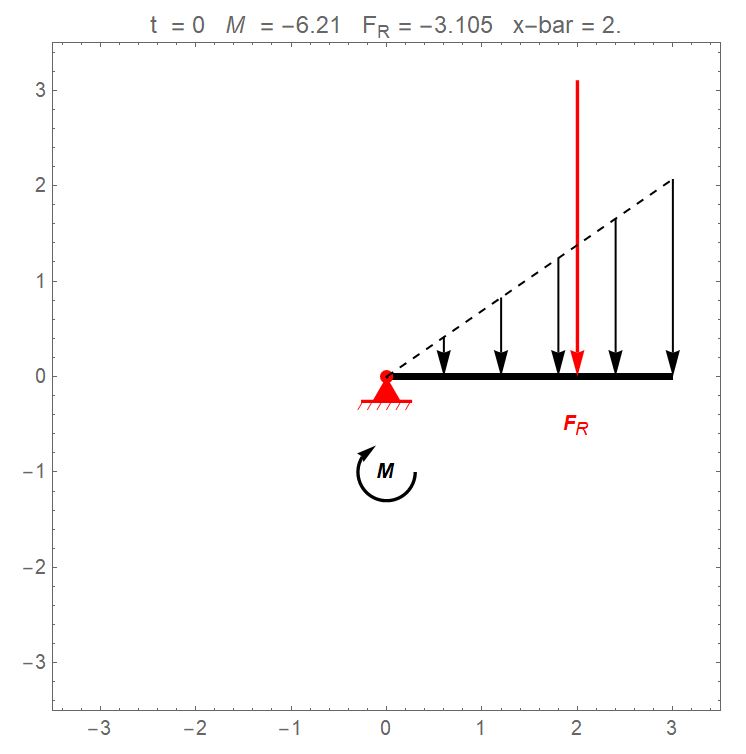
15. Reduction of a Distributed Loading
16. Open a Lid
17. Introduction to FBD
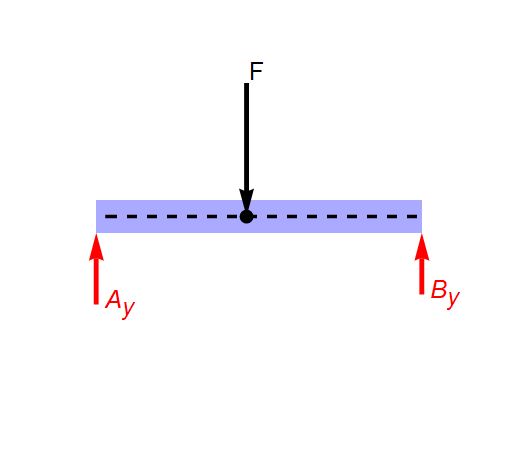
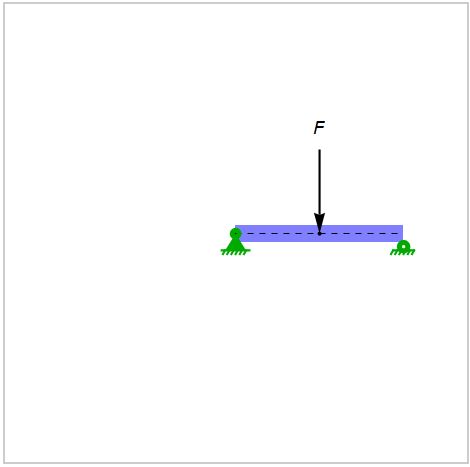
18. FBD of Beam
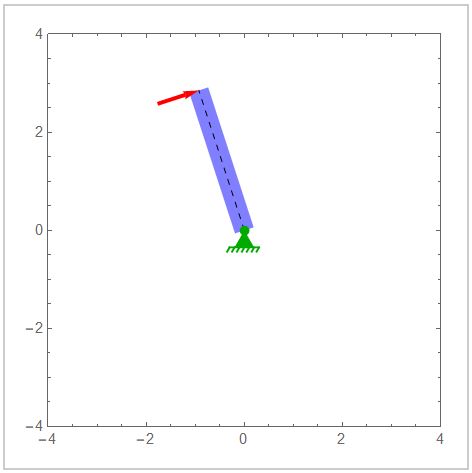
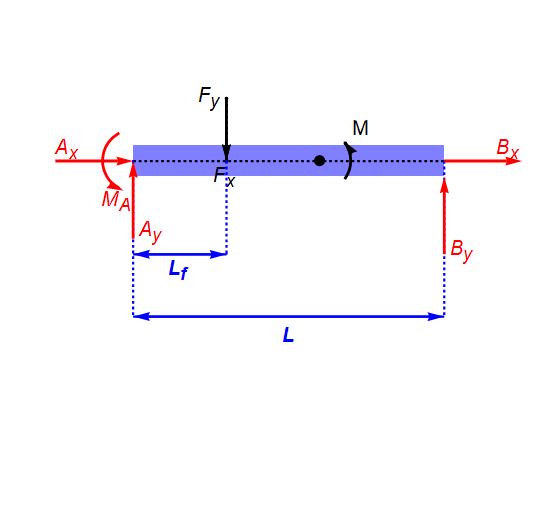
19. Equilibrium of Beams
20. Determinacy of Beams
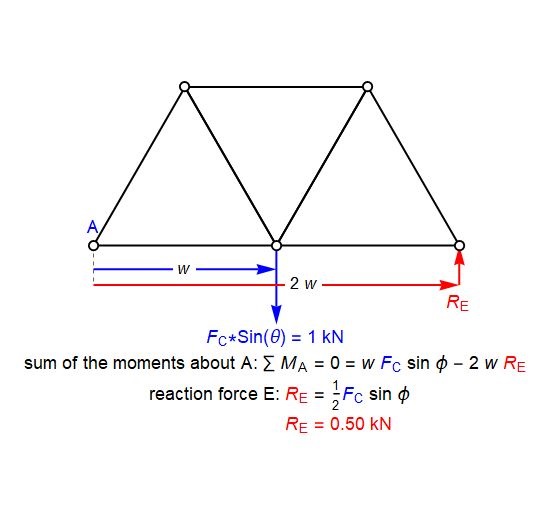
21. Method of Joints
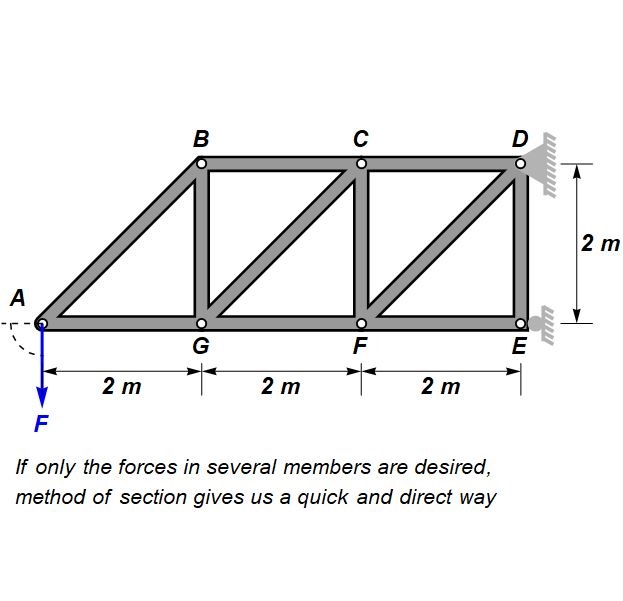
22. Method of Sections
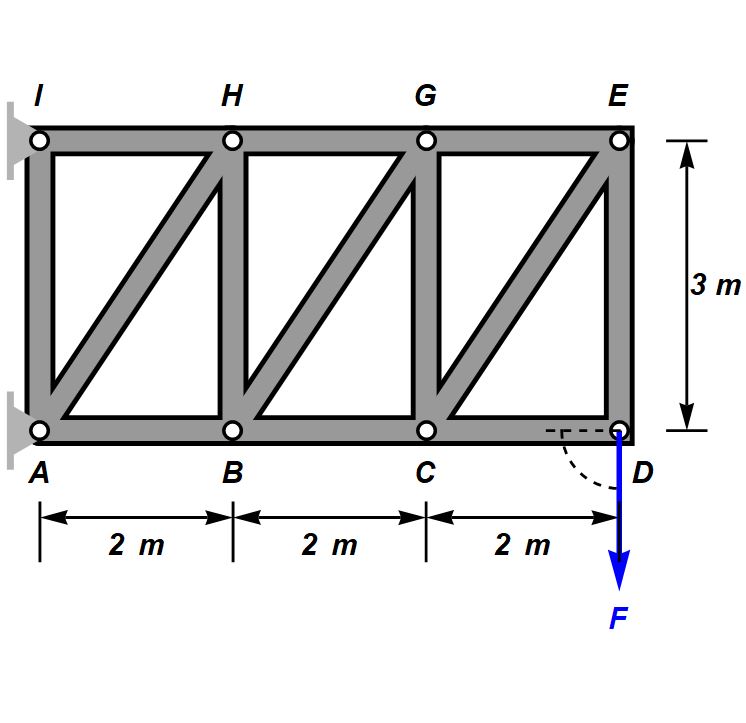
23. Comprehensive Truss Problem
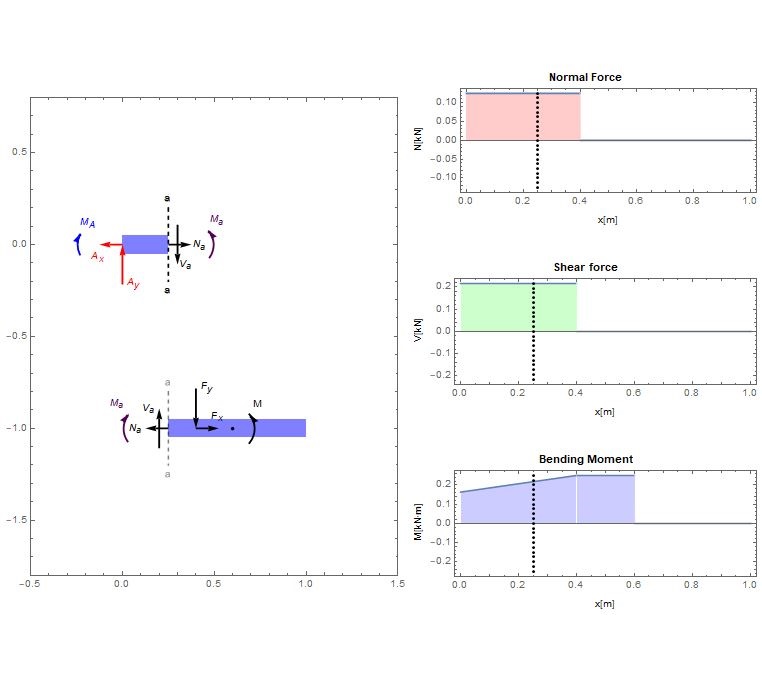
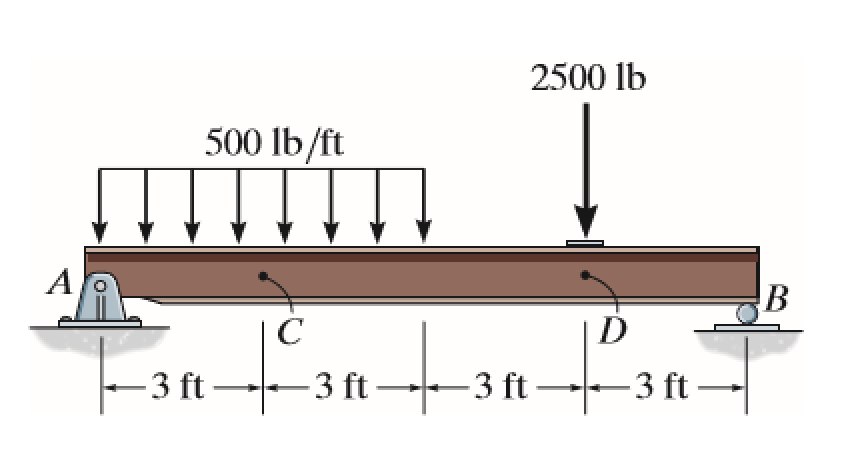
24. Internal Loadings in a Beam 1
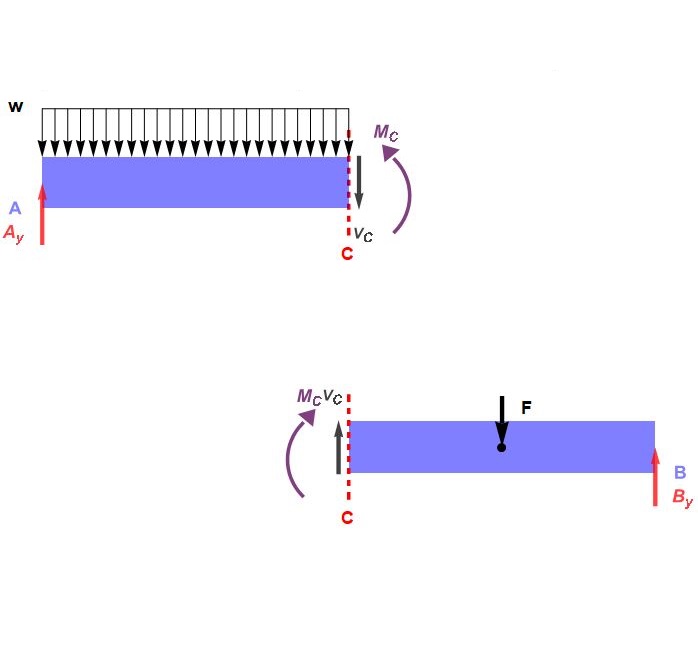
25. Internal Loadings in a Beam 2
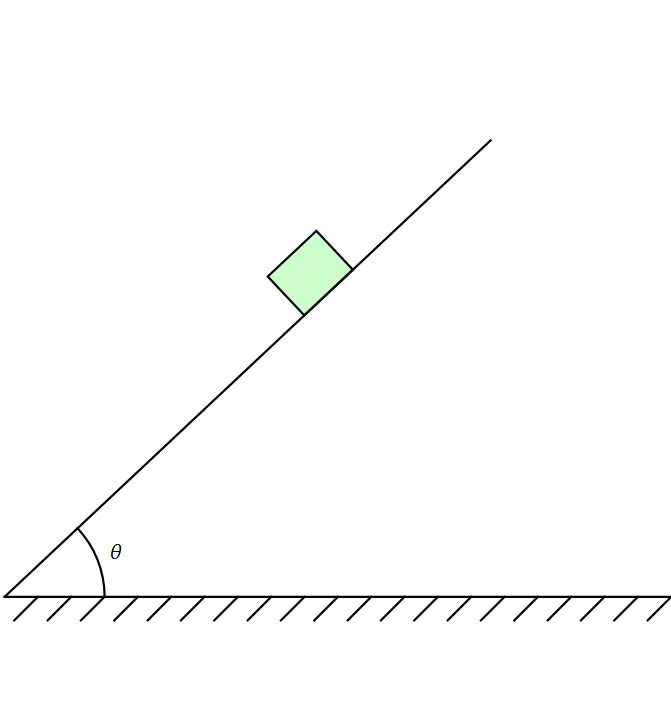
26. Friction
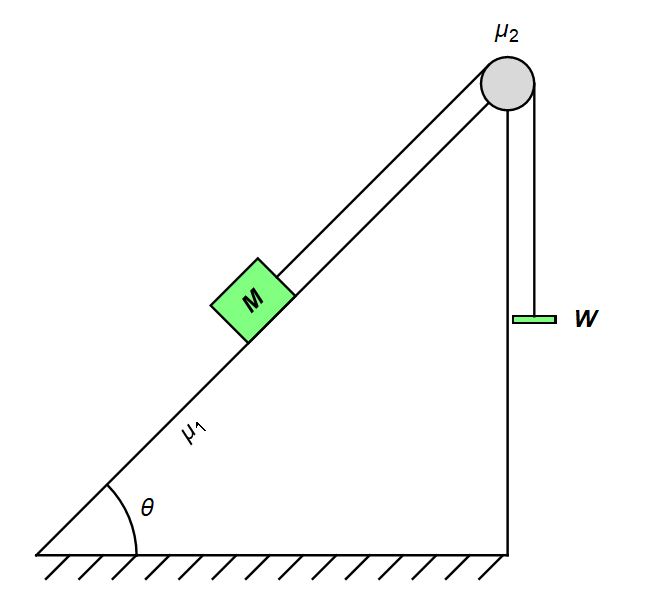
27. Moving Downward or Upward
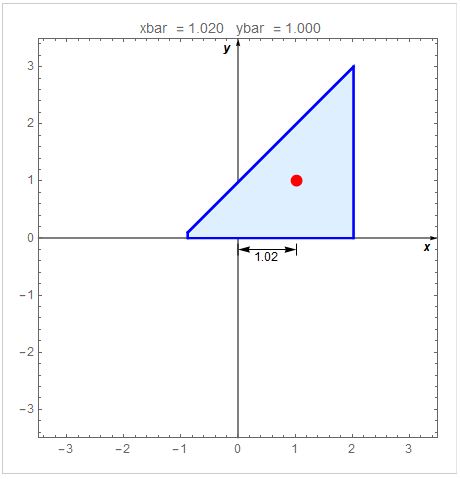
28. Centroid of a Body
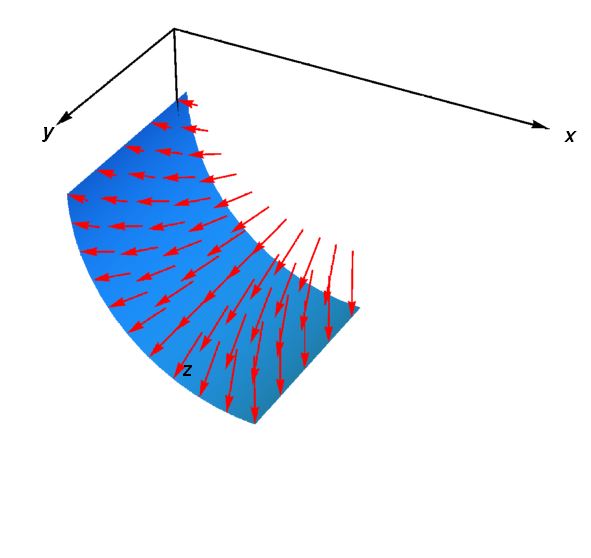
29. Fluid Pressure
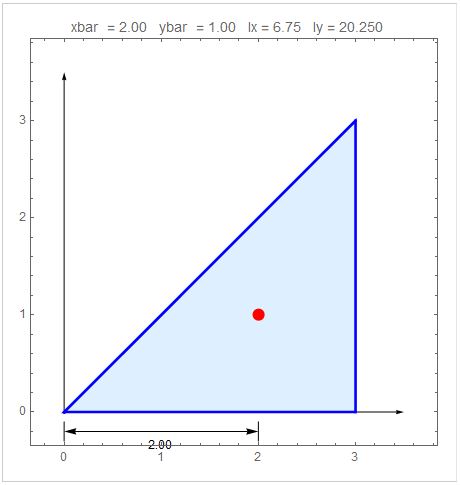
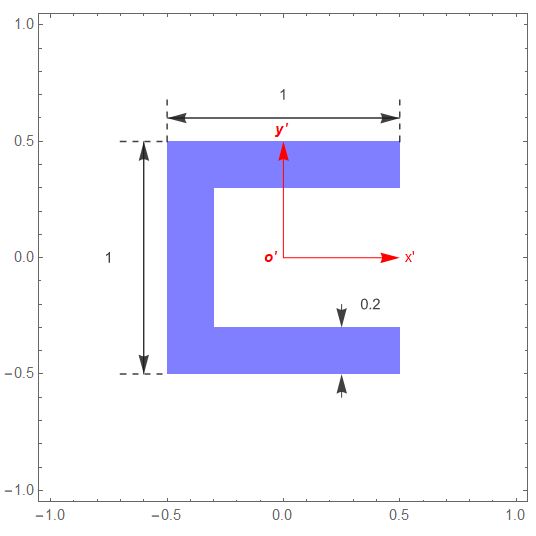
30. Moment of Inertia
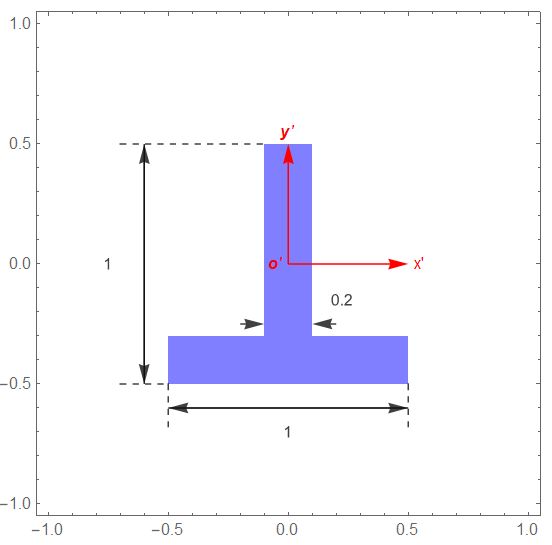
31. Moment of Inertia for Composite Areas